摘要基于视频的目标的跟踪是交通事件检测的一种重要方法,对视频中的目标物提取之后,再对目标物的跟踪是现代基于视频交通事件检测的重要手段。基于目标区域和目标特征点的跟踪方法既简单又快捷。目标区域的跟踪主要工作是对目标物重心的提取,并对重心进行跟踪。而目标特征跟踪首先是对目标物体特征点的提取,提取完毕后,对特征点进行跟踪,跟踪的方法主要采用模版匹配。基于视频的目标跟踪主要讨论了这两种方法。基于视频的目标跟踪主要的目的就是交通事件的检测。
论文关键词:跟踪,区域,重心,特征点
1.1目标区域的重心
我们利用连通域标记[1]来判断行人。根据连通域的外接矩形的重心的跟着轨迹来判断行人。目标区域由于背景提取和二值化的偏差,目标物的中心往往不是目标物的重心。所以本文根据目标区域计算目标区域的重心[2]。从而对重心进行跟踪。
由于二值化的影响使连通域标记的外接矩形的不能更好的反应目标物地真实情况。现在为了避免上述情况,本文在确定外接矩形前进行二值化投影。先进行行投影。统计每行中的块为白色的块数,再进行列投影,统计每列中的块为白色的块数。
根据行投影和列投影计算目标物的重心。以重心的列的坐标计算为例,其计算思想:设图像目标物块数为 ,列数为 ,列数为 ,对应列 ,对应列 的目标物块数为 的目标物块数为 ,几率为: ,几率为:
 , i=1,2,3,L-1,L , i=1,2,3,L-1,L

则重心的列y=i*pi。
1.2目标区域的重心轨迹分析
得到目标物重心以后,进行目标物重心的跟踪,跟踪的思想:得到重心后,保存重心的行和列,第二帧在上一帧中的重心附近进行搜索,搜索的范围本文设定为行数块数为4块列数的块数为8块,如果搜索到有目标物的重心,就认为两帧为同一目标物,更新重心的列和行坐标,搜索下一帧。本文搜索的帧数设定为10帧。根据每十帧目标物重心的跟踪轨迹[3],分析目标物的速度。由于车辆速度较快,行人速度较慢,但阈值的选取有困难,所以目标物的速度在本文中是十帧的位移矢量和,这样做是为了放大速度之间的差距。图像中目标物重心的跟踪结果可描述为下图形式

2 目标区域特征点的跟踪
2.1特征点的选取
目标物的特征点[4]的选取直接影响到目标物的跟踪,所以选取目标物的特征点要有代表性和特征性。如图所示的目标物。本文选取目标物的棱角作为它的特征点。

目标物的特征点
特征点选取思想:从图中看到,在目标物的左右边缘两侧的像素的灰度值差别是非常大的,一侧是目标物本身,另一侧为背景,同样,在目标物的上下边缘两侧的像素得灰度值差别也是非常大的,一侧是目标物本身,另一侧为背景。所以我们利用目标物左右和上下边缘两侧的像素灰度差的来选取特征点。
特征点选取过程:
(1) 搜索图像,当搜索到目标物上的像素时(目标物像素值为255,背景像素值为0)计算它的左上与右上像素灰度值的差,正前与正后的像素灰度值差,左下与右下的像素灰度值差,并将他们之差的绝对值求和。
(2) 当求得的和大于所设定阈值时,认为这一点在目标物的边界上。
(3) 对(2)中的点计算它的左上与左下的像素灰度值差,正上与正下的像素灰度值差,右上与右下的像素灰度值差,并将他们之差的绝对值求和。
(4) 当求得的和大于所设定阈值时,认为这一点是目标物的特征点。否则不是目标物的特征点。
2.2特征点的跟踪
特征点跟踪是根据第i帧中得到的模板在第i+1帧得到匹配最佳的目标区域。影响跟踪效果好坏的四个因素为:模板[5],候选目标,相似度的衡量。本文的跟踪方法模板都是需要更新的,即第i帧中的模板在第i+1帧中找到最佳匹配的目标区域后,在第i+2帧以i+1帧中找到最佳匹配的目标区域作为新的模板,以此类推。
(1)模板表示。跟踪方法模板的表示为特征点为中心的矩形框内的像素值。由于目标帧间运动小,可以为下一帧的搜索指定一个范围。模板匹配的模板以块(Block)为存储结构的匹配过程就是基于块匹配[6]。块匹配跟踪的思想是将视频图像中的每一帧图像分成多个相互不重叠的子块(M*N),并假设块内所有像素点的位移矢量完全是相同的,把分出来的每个子块当作实际运动的目标物体。对于当前帧中的每一个子块,在前一帧或后一帧某一设定的搜索范围(K*L)内,根据给定的匹配准则,找到与当前帧当前块块相似度最高的子块,即为匹配块。由上一帧或者下一帧得到的匹配块,和当前块的相对的位置可以得到这两帧的物体运动位移,所得到的运动位移作为当前块运动矢量,用D来表示。
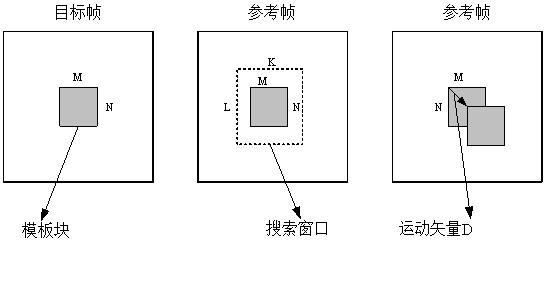
块匹配原理图
设可能当前帧中的运动位移的最大矢量为D ,则下一帧的块的搜索窗口的相应的大小可用 ,则下一帧的块的搜索窗口的相应的大小可用 表示。当前匹配块与搜索窗口间的关系可用下图表示: 表示。当前匹配块与搜索窗口间的关系可用下图表示:

匹配块与搜索窗口关系示意图
对视频图像中的每个含有目标的块(8*6)进行跟踪,从而可以得到目标的运动轨迹。
(2)候选目标表示。候选目标的表示为和特征点为中心的矩形框内灰度值。
(3)目标物特征点的相似度衡量。相似度衡量是根据相应的计算来完成的,相关计算值大的表示相似程度高。在计算相似度的衡量上常用的函数有以下几种:
最小平均绝对差值函数(MAD):

最小均方误差函数(MSE):

最大匹配像素统计(MPC):

其中, 为一阈值。 为一阈值。
归一化的互相关(NC)函数 :

其中,  , ,

其中,MAD、MSE[7]和MPC方法的实现比较简单,运算量较小,但对于光照的变化敏感。当出现夜晚或者白天更替时,跟踪的效果不好。而NC方法对灰度的线性变化不敏感,但计算量很大。由于本文以隧道视频图像为主,隧道视频图像受夜晚和白天的更替影响较小,所以本文采用MAD的相似度衡量。
结语:目标物体的跟踪是判断交通事件的重要途径,区域的跟踪和目标特征点的跟踪是要基于图像二值化,图像二值化的准确程度直接决定了跟踪的准确性,特别是特征点的跟踪。当多个目标物体出现重叠或者遮挡时,区域的跟踪和目标特征点的跟踪的方法就失去了作用。所以目标物体的遮挡问题是今后应该重点研究的方向。
参考文献
[1] 黄卫, 陈里得. 智能运输系统(ITS)概述[M]. 北京: 人民交通出版社. 2001
[2] 黄若芸, 莫玉龙. 用于智能交通“车流量监测”的压缩域内运动目标监测. 上海大学学报[J]. 2003, 9(2): 100~104
[3] 于艳玲. 视频检测中的的车辆速度检测技术研究[D]. 陕西省西安市: 长安大学. 2009
[4] 高红波, 王卫星. 一种二值化图像连通区域标记的新算法[J]. 计算机应用.2007
[5] 章毓晋. 图像工程(上册)——图像处理和分析[M]. 北京: 清华大学出版社, 1999: 256-265
[6] 肖志坚. H.264帧间编码技术的分析与改进[D]. 陕西省西安市: 西安电子科技大学. 2005
[7] 彭小宁, 杨明. 基于局部图金字塔的不规则块匹配视频分割方法[J]. 计算机科学. 2008
|

