摘要:为了研究3-RRR柔顺并联机构的性能,分别对其刚度、运动学、温度影响分析、模态分析和谐响应分析。采用有限元软件ANSYS对其特性进行比较分析,分析结果可得如下结论:机构能实现3个自由度运动,并且各个输入端对输出位移的影响不同;温度对机构的输出位移有较大影响,而且温度对其输出位移的关系是线性的;从机构的前3阶振型可知,机构能实现3自由度运动;从谐响应分析结果可知,输出位移都是在接近于固有频率的地方有最大值,但不同输入端在不同频率段对各个方向位移作用不同。
论文关键词:3-RRR,柔顺并联机构,温度影响,谐响应分析,模态分析
近年来,面向生物工程、医学工程以及微加工等领域的微操作机器人技术受到国内外的广泛关注[1-3],发展速度极快,已被应用于实现细胞的注射和分割,微机电产品的加工和装配和微外科手术等领域,为此,要求微操作机器人具有无摩擦、无间隙、响应快、结构紧凑、刚性好以及误差积累小等特点。 柔顺并联机构作为微操作机器人机构,可以充分发挥其自身特点:机构紧凑、重量轻、刚性好、工作空间不大、运动精度高,在三维空间的微小运动精度可以达到亚微米甚至是纳米的分辨率。柔顺并联机构在微操作机器人领域中有着广阔应用前景 [4-7]。
本文采用有限元法对3-RRR柔顺并联机构的静态和动态性能进行分析,以认识其性能特征。
2 3-RRR柔顺并联机构
3-RRR平面柔顺并联机构示意图如图1所示,它是由3个RRR运动支链组成,各个运动关节为柔性铰链,可以实现动平台 和 和 方向的平动及绕 方向的平动及绕 轴的转动。驱动端为压电陶瓷驱动器作用位置。对于柔顺并联机构而言,柔性铰链的选择与设计是整个机构设计的关键。采用正圆形柔性铰链作为机构的运动副,其结构尺寸如图2所示, 轴的转动。驱动端为压电陶瓷驱动器作用位置。对于柔顺并联机构而言,柔性铰链的选择与设计是整个机构设计的关键。采用正圆形柔性铰链作为机构的运动副,其结构尺寸如图2所示, mm、 mm、 mm、 mm、 mm。由于柔顺机构依靠材料的弹性变形产生运动,这种变形的大小受到材料许用应力的限制,而许用应力的大小又直接与材料的疲劳强度有关,则材料需要有较长的疲劳寿命才可能正常地执行其功能。所以,模型材料选用弹簧钢,其弹性模量为211 GPa,泊松比为0.28。 mm。由于柔顺机构依靠材料的弹性变形产生运动,这种变形的大小受到材料许用应力的限制,而许用应力的大小又直接与材料的疲劳强度有关,则材料需要有较长的疲劳寿命才可能正常地执行其功能。所以,模型材料选用弹簧钢,其弹性模量为211 GPa,泊松比为0.28。
           

图1 3-RRR柔顺并联定位平台
   
Fig. 1 3-RRR compliant parallel positioning stage 
图2正圆柔性铰链
Fig. 2 Circle flexure hinge
3静态特性分析
采用有限元软件ANSYS对定位平台进行分析其性能。为了提高计算精度,平台有限元模型采用二次实体单元Solid 95。如图1所示的平台的运动支链结构参数 mm、 mm、 mm、 mm、 mm。 mm。
3.1刚度分析
刚度是设计和评价柔顺机构的定位精度的一项重要指标,刚度为柔度的倒数,柔度定义表示其输入力与输出位移之间关系矩阵关系式
 * MERGEFORMAT (1) * MERGEFORMAT (1)
式中,向量 3个分量分别表示 3个分量分别表示 、 、 方向上的位移和绕 方向上的位移和绕 轴转动角度, 轴转动角度, 表示施加在如图1所示的驱动端1、2和3的输入力。 表示施加在如图1所示的驱动端1、2和3的输入力。
根据式(1)表示的柔度的定义关系式,应用软件ANSYS获得柔度矩阵的过程为:①分别在输入端施加 、 、 、 、 ;②测量输出端的位移,则可以得到相应的柔度矩阵的某一列元素,则可以得出机构的柔度矩阵分别如下: ;②测量输出端的位移,则可以得到相应的柔度矩阵的某一列元素,则可以得出机构的柔度矩阵分别如下:
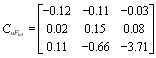 * MERGEFORMAT (2) * MERGEFORMAT (2)
其中,式(2)得出的位移单位为 ,转角单位为 ,转角单位为 ,由式(2)可知机构输入与输出之间相互影响,其中输入端3对转角影响最大。 ,由式(2)可知机构输入与输出之间相互影响,其中输入端3对转角影响最大。
3.2运动学分析
柔顺并联机构的运动特性采用雅可比矩阵反映其输入位移与输出位移之间的关系,反映机构输入位移与输出位移之间关系的表达式可写为
 * MERGEFORMAT (3) * MERGEFORMAT (3)
同理,根据雅可比矩阵的定义关系式,应用软件ANSYS获得雅可比矩阵的过程为:①分别在载荷端施加单位位移(1 );②测量动平台中心的位移,则可以得到相应的雅可比矩阵的某一列元素,则可得出4种构型的机构的雅可比矩阵分别如下: );②测量动平台中心的位移,则可以得到相应的雅可比矩阵的某一列元素,则可得出4种构型的机构的雅可比矩阵分别如下:
 * MERGEFORMAT (4) * MERGEFORMAT (4)
由式(4)表示的雅可比矩阵可知,机构能实现3个自由度运动,并且各个输入端对输出位移的影响不同。

图3 温度对X方向位移的影响
3.3温度对机构的影响分析
为了比较分析温度对柔顺并联机构的影响,将温度作为载荷施加于机构。参考温度设为22oC,温度范围为-10~40 oC,图3、图4和图5分别表示温度对X方向位移、Y方向位移和Z方向转角的影响。从图中可知,温度对机构的输出位移有较大影响,而且温度对其输出位移的关系是线性的。

图4 温度对Y方向位移的影响

图5 温度对Z方向转角的影响
Fig. 3 The relationship between output displacements and input displacements
4动态性能分析
表1机构的固有频率比较分析
Table 1 Comparative analysis of the natural frequency of the mechanism
阶数
1
2
3
固有频率 (Hz)
686.4
774.0
775.9
运动方向
Z轴转动
Y轴平动
X轴平动

(a) 第1阶振型

(b) 第2阶振型

(c) 第3阶振型
图6 机构前3阶振型
4.1模态分析
模态分析是一种用来确定结构振动特性如固有频率和振型等参数。模态分析有利于结构设计避免共振或以特定频率进行振动,认识柔顺并联机构对于不同类型的动力载荷是如何响应的,也有助于在其它动力分析中估算求解控制参数。图为机构的前3阶振型,表1为其固有频率和第一阶振型对应的运动方向,由图和表1可知,机构能实现3自由度运动。
1/2 1 2 下一页 尾页 |

